
MAAM (Robea CNRS) – 2003 2006
Le nom de ce projet est l’acronyme récursif : MAAM (Molecule = Atom | (Atom + Molecule).
C’est un projet du programme ROBEA du CNRS.
Il s’agit d’un robot reconfigurable composé de plusieurs modules autonomes en CPU, en énergie et en mouvements. À terme,
les modules doivent pouvoir s’associer physiquement pour constituer des robots complexes aptes à franchir des obstacles qu’un seul robot ne pourrait franchir seul.
Les modules MAAM sont commandés par une architecture légère et adaptable, pouvant être appliquée à d’autres systèmes robotiques ou mécatroniques. Les originalités de ces travaux sont (i) que nous considérons les robots à travers une approche langagière dans une approche dynamique et explicite et (ii) que les aspects de communication sont abstraits et font partie naturellement du langage (ainsi, le programme de marche du robot Xi peut s’exécuter dans le robot Xj)
Cette approche permet un transfert facile vers d’autres champs de recherche comme les réseaux de capteurs, l’intelligence ambiante et la robotique ubiquitaire.
D’un point de vue technologique, on s’attache à une réalisation de faible coût, et de taille très réduite, facile à embarquer dans un système mécatronique.
J’ai travaillé sur ce projet entre 2003 et 2006.
Mon travail englobe
- La conception de l’électronique des robots
- La conception du firmware des robots, incluant la communication bluetooth
- Les outils de contrôle/commande d’un groupe de robots
- La modélisation et la simulation des robots en 3D avec ODE (Open dynamic Engine)
- A4CR : un langage et une architecture distribuée, pour la robotique collective
Videos
Simulation
Dans le simulateur, chaque robot est animé par un thread. Chaque thread assure la mobilité du robot, en fonction d’un programme A4CR qu’il interprète. Ainsi, l’architecture logicielle est la même dans le simulateur que dans la réalité.
Simulation de l’attache de 2 modules. Les capteurs utilisés sont des émetteurs et récepteurs infra-rouge. Avant l’amarrage, il faut que les pattes soient alignées.
6 robots autonomes se déplacent vers un attracteur (émetteur IR). La détection se fait grâce à des capteurs IR placés au bout de chacune des 6 pattes de chaque module.
Prototype
Premières vidéos du premier prototype pour tester l’algorithme de marche.
Synchronization
Dans la première séquence, chaque robot se comporte comme esclave du précédent et maître du suivant.
Dans la seconde, le robot de tête exécute en parallèle ses instructions et les instructions élémentaires de tous les robots connectés.
Publications
2006
- IECON-06 C. Guéganno, D. Duhaut. « A4CR: an Architecture for Collective Robotic », 32nd Annual Conference of the IEEE Industrial Electronics Society, Paris, France, Novembre 7-10, 2006.
- ICMA-06 C. Guéganno, D. Duhaut. « Abstraction of the Communication in a Team of Robots with a Language Approach », in proceedings of IEEE International Conference on Mechatronic and Automation, Luoyang, Henan, China, June 25-28, 2006.
- CAR’06 D. Duhaut, C. Guéganno, Y. Le Guyadec, M. Dubois. « HoRoCol Language and Hardware Modules for Robots » , in proceedings of 1st National Workshop on Control Architectures of Robots: Software Approaches and Issues, Montpellier, France, April 6-7, 2006.
- DARS-06 Claude Guéganno and Dominique Duhaut, Distributed Robotic: a Language Approach, in proceedings of the 8th International Symposium on Distributed Autonomous Robotic System, Minneapolis/St. Paul, Minnesota, USA, July 12-14, 2006.
2005
- ICMA-05 Y. Le Guyadec, C. Guéganno, M. Dubois, D. Duhaut. « Using HoRoCol to Control Robotic Atoms », in proceedings of IEEE International Conference on Mechatronic and Automation, Niagara Falls (Ontario), August 2005.
- ISIE-05 Claude Guéganno and Dominique Duhaut, « A Versatile and Open Software/Hardware Architecture for Mechatronic Systems » in proceedings of IEEE International Symposium on Industrial Electronics 2005, June 20-23, Dubrovnik (Croatia).
- CIRA-05 Claude Guéganno and Dominique Duhaut, « Remote Tools using Wireless Communication for Self-Reconfigurable Robot, Applied to MAAM Project »,in proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, 2005. Espoo (Finland)
2004
- DARS-04 Claude Guéganno and Dominique Duhaut, « A Hardware/Software Architecture for the Control of Self-Reconfigurable Robots », in proceedings of the 7th International Symposium on Distributed Autonomous Robotic System, Toulouse (France).
Divers

Xatome = le premier outil écrit pour la mise au point des mouvements, intégrant la commande à distance de n robot(s) réel(s).
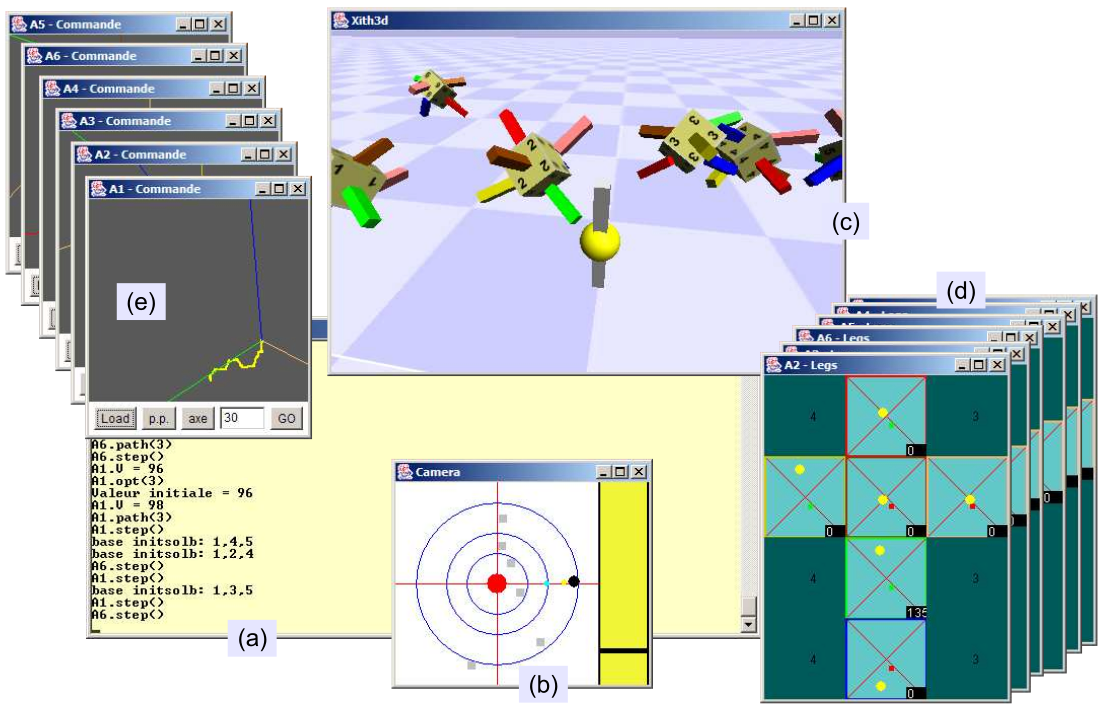
Fenêtres du simulateur : ici, le simulateur a été lancé avec 6 atomes et 1 attracteur. (a) console avec visualisation des traces d’exécution ; (b) fenêtre de commande permettant de déplacer les agents et de placer la caméra ; (c) rendu 3D ; (d) pour chaque atome contrôle/commande des pattes et visualisation du niveau de lumière capté à l’extrémité de la patte ; (e) fenêtre de visualisation de la projection au sol du centre de gravité de chaque atome, et panneau de commande (chargement de programmes A4CR dans les atomes).
Hexapod
L’architecture A4CR implémentée dans un robot hexapode à l’occasion de « Sciences en fête » (UBS Lorient – 2005).