MICROBIT : UN “NIVEAU À BULLE”


L’objectif est de créer un “niveau à bulle” , c’est-à-dire un outil qui permette de vérifier l’horizontalité ou la verticalité d’une surface.
Il n’y aura pas de bulle dans notre niveau à bulle …
Nous allons proposer deux solutions différentes
- un affichage qui utilise les LED de la carte
- un affichage qui déplace une lumière sur un Neopixel
Principe de fonctionnement
L’accéléromètre du microbit mesure constamment aussi bien l’accélération de la pesanteur à la surface de la terre (environ 9.81 m/s2), dirigée verticalement vers le bas, que des accélérations dues aux changements de vitesse dans les deux autres directions.
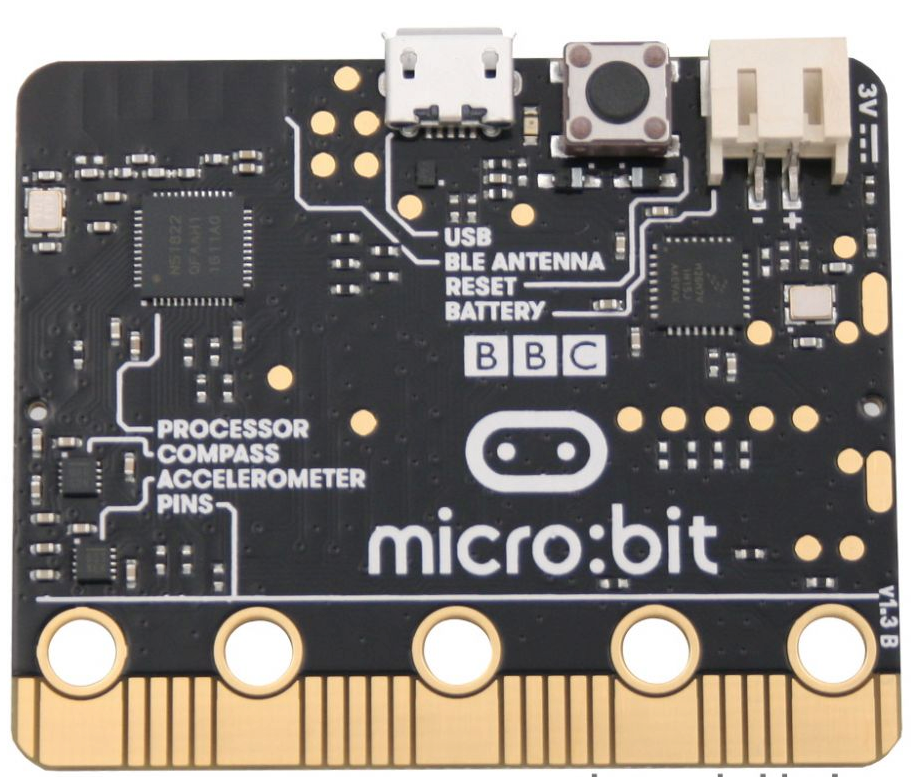
L’accéléromètre est bien visible sur la carte du micro:bit. Il est tout-à-fait analogue à ceux qui se trouvent dans les smartphones et qui permettent de déterminer leur orientation ou leurs mouvements.
Ce capteur peut mesurer l’accélération dans chacune des trois dimensions (axes x, y et z), y compris l’accélération de la pesanteur terrestre.

À partir de ces valeurs lues en permanence par le capteur, il est possible de déterminer l’inclinaison avant (pitch) et l’inclinaison latérale (roll).
1/ Mise en œuvre
Il y a une méthode pour chaque axe qui renvoie un nombre positif ou négatif qui indique une mesure en milli-g. Lorsque la lecture est de 0, il y a un alignement selon cet axe.
Par exemple, voici un « niveau à bulle » très simple qui utilise get_x pour mesurer l’alignement de l’appareil selon l’axe X:
from microbit import *
while True:
acc = accelerometer.get_x()
print (acc)
if acc > 0:
display.show(Image.ARROW_E)
else:
display.show(Image.ARROW_W)
sleep(100)
|
 |
|
E1 : Testez le programme précédent sur la microbit
|
2/ Utilisation avancée de l’écran (display)
Les valeurs renvoyées par les méthodes get_x() et get_y() sont comprises entre -1024 et +1024.
|
E2 : Écrivez un programme qui va allumer un pixel de l’écran au centre, lorsque la carte est parfaitement horizontale.
Le pixel se déplace à droite ou à gauche (selon l’axe x) lorsque la carte tourne autour de l’axe y.
|
|
E3 : Écrivez un programme qui va allumer un pixel de l’écran au centre, lorsque la carte est parfaitement horizontale.
Le pixel se déplace en haut ou en bas (selon l’axe y) lorsque la carte tourne autour de l’axe x.
|
|
E4 : Enfin, le pixel se déplace sur tout l’écran selon les rotations de l’axe x ou l’axe y
|
3/ Niveau à bulle et Neopixel
Il s’agit de visualiser le niveau sur un axe, avec un rendu LED, grâce à un Neopixel.
|
E5 : En partant des programmes précédents et du TP sur Neopixel, la bulle de l’axe x est maintenant matérialisée par une lumière qui se déplace sur le Neopixel.
Si vous avez le temps : une couleur pour la bulle x et une autre couleur pour la bulle y
|

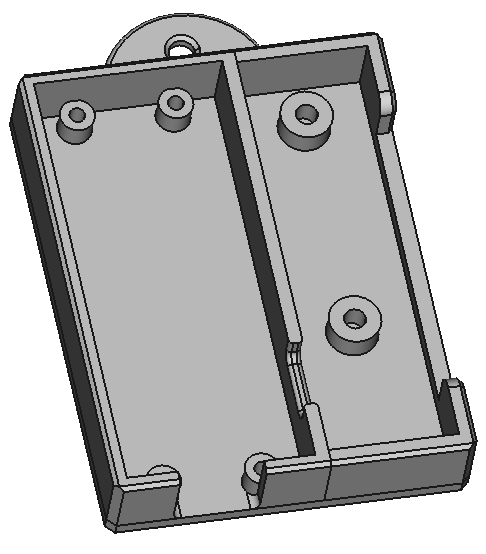
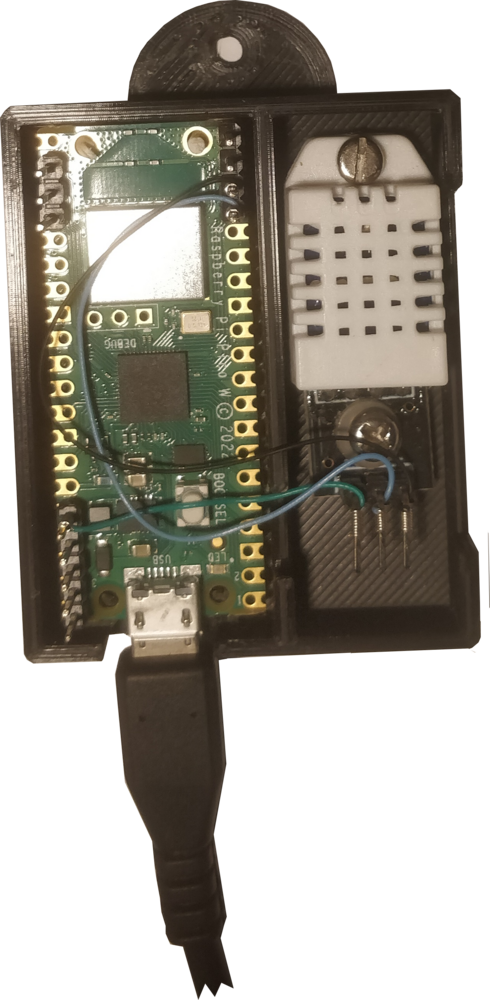

 Exemple de réalisation
Exemple de réalisation